
對比實驗:步進電機驅動方式的不同對蠕動泵精度的影響
生物反應器對于過程中補料、補酸堿的需求決定了設備對蠕動泵控制精度的高要求,而步進電機控制蠕動泵的方式有多種,用于生物反應器上的通常是脈沖、模擬量和RS-485通訊三種。
為了研究這三種控制方式對于蠕動泵控制精度的直觀影響,HOLVES專門做了一次對比實驗。

脈沖量:是取值總是不斷的在0(低電平)和1(高電平)之間交替變化的數字量。每秒鐘脈沖交替變化的次數稱為頻率。脈沖量主要用于步進電機和伺服電機的位置控制、速度控制、扭矩控制等。
模擬量:是連續的電壓、電流等信號量,模擬信號是幅度隨時間連續變化的信號,其經過抽樣和量化后就是數字量。模擬量多是非電量,而PLC只能處理數字量、電量,所以要實現它們之間的轉換需要有傳感器把模擬量轉換成數電量。如果這一電量不是標準的,還需要通過變送器把非標準的電量轉換成標準的電信號。此外,還需要有模擬量輸入單元(AD)把這些標準的電信號轉換成數字信號。
測試3種不同驅動方式的蠕動泵在“不同轉速下泵出相同體積的液體”和“相同轉速下泵出不同液體體積”兩種情況下,通過液體體積與設定值的差異去判斷步進電機的驅動方式在不同于校準參數時對蠕動泵精度的影響。
2、實驗方法及步驟
(1)實驗材料
脈沖量蠕動泵(測試前已進行校準)
模擬量蠕動泵(測試前已進行校準)
RS-485通訊蠕動泵(測試前已進行校準)
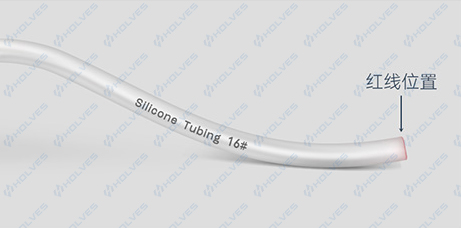
16號硅膠管
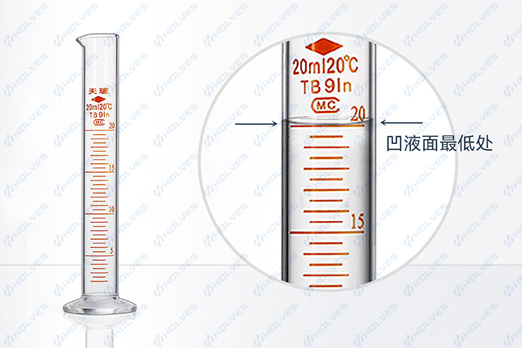
量筒1(量程: 20mL,精度: 0.5mL)
量筒2(量程: 50mL,精度: 1mL)
燒杯
純水
(2)實驗步驟
① 將16號硅膠管扣入蠕動泵滾輪中心,扣上蓋板以固定蠕動泵;
② 將硅膠管進液端和出液端均放置在裝有純水的燒杯中;
③ 設定手動轉速,將硅膠管內的空氣排出,當純水泵至硅膠管出液端管口時,即下圖紅線位置,停止泵液;
④ 將出液端放置在合適量程的量筒內,注意不要貼壁,以防液體掛壁影響實驗結果;
⑤ 在設備上設置好蠕動泵的轉速和目標泵出液的體積后,運行蠕動泵,并記錄運行時間;

⑥ 泵液結束后,觀察并記錄實際泵出液的體積;
⑦ 重復以上操作,測試并記錄所有蠕動泵的運行數據。
3、注意事項
① 蠕動泵在進行實驗前,統一使用16號硅膠管以50rpm的轉速泵出20mL的泵出液體積,以進行校準操作。
② 在實驗進行過程中,無論泵出液體積出現多少差異,都不可再進行校準操作。
③ 讀取泵出液體積時,將量筒放在平整的桌面上,使視線與量筒內液體凹液面的最低處保持水平。
4、實驗數據分析
實驗的數據進行整理,得到下表:
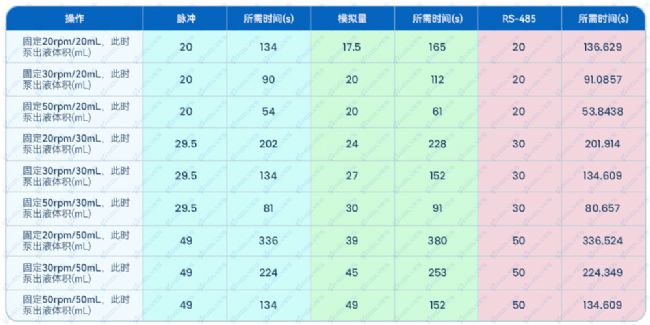
(步進電機驅動精度測試)
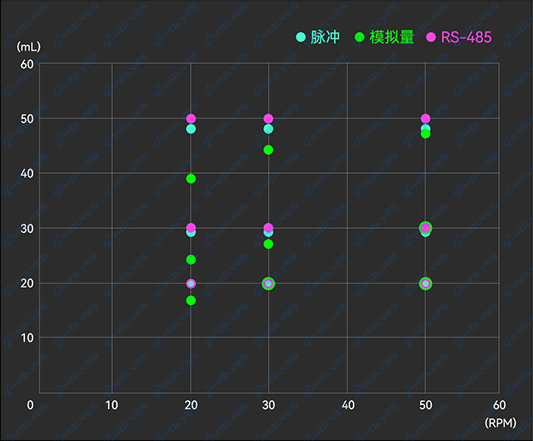
(精度測試散點示意圖)
從表中數據可以看出,一旦改變了轉速和泵出量,不同的驅動方式控制的蠕動泵會有不同結果。3種驅動方式中,RS-485通訊方式的控制精度最優,脈沖次之,模擬量的誤差最大。
為了研究這三種控制方式對于蠕動泵控制精度的直觀影響,HOLVES專門做了一次對比實驗。
首先,先要了解這三種驅動方式分別是什么?
脈沖量:是取值總是不斷的在0(低電平)和1(高電平)之間交替變化的數字量。每秒鐘脈沖交替變化的次數稱為頻率。脈沖量主要用于步進電機和伺服電機的位置控制、速度控制、扭矩控制等。
模擬量:是連續的電壓、電流等信號量,模擬信號是幅度隨時間連續變化的信號,其經過抽樣和量化后就是數字量。模擬量多是非電量,而PLC只能處理數字量、電量,所以要實現它們之間的轉換需要有傳感器把模擬量轉換成數電量。如果這一電量不是標準的,還需要通過變送器把非標準的電量轉換成標準的電信號。此外,還需要有模擬量輸入單元(AD)把這些標準的電信號轉換成數字信號。
RS-485:是一種串行數據接口標準,為了擴展應用范圍通信能力,增加了多點、雙向通信能力,即允許在一條平衡總線上連接最多32個接收器,同時還增加了發送器的驅動能力和通信沖突的保護特性,通過差分傳輸擴展總線的共模范圍。
#實驗測試#
1、實驗設計測試3種不同驅動方式的蠕動泵在“不同轉速下泵出相同體積的液體”和“相同轉速下泵出不同液體體積”兩種情況下,通過液體體積與設定值的差異去判斷步進電機的驅動方式在不同于校準參數時對蠕動泵精度的影響。
2、實驗方法及步驟
(1)實驗材料
脈沖量蠕動泵(測試前已進行校準)
模擬量蠕動泵(測試前已進行校準)
RS-485通訊蠕動泵(測試前已進行校準)
16號硅膠管
量筒1(量程: 20mL,精度: 0.5mL)
量筒2(量程: 50mL,精度: 1mL)
燒杯
純水
(2)實驗步驟
① 將16號硅膠管扣入蠕動泵滾輪中心,扣上蓋板以固定蠕動泵;
② 將硅膠管進液端和出液端均放置在裝有純水的燒杯中;
③ 設定手動轉速,將硅膠管內的空氣排出,當純水泵至硅膠管出液端管口時,即下圖紅線位置,停止泵液;
④ 將出液端放置在合適量程的量筒內,注意不要貼壁,以防液體掛壁影響實驗結果;
⑤ 在設備上設置好蠕動泵的轉速和目標泵出液的體積后,運行蠕動泵,并記錄運行時間;
⑥ 泵液結束后,觀察并記錄實際泵出液的體積;
⑦ 重復以上操作,測試并記錄所有蠕動泵的運行數據。
3、注意事項
① 蠕動泵在進行實驗前,統一使用16號硅膠管以50rpm的轉速泵出20mL的泵出液體積,以進行校準操作。
② 在實驗進行過程中,無論泵出液體積出現多少差異,都不可再進行校準操作。
③ 讀取泵出液體積時,將量筒放在平整的桌面上,使視線與量筒內液體凹液面的最低處保持水平。
4、實驗數據分析
實驗的數據進行整理,得到下表:
(步進電機驅動精度測試)
(精度測試散點示意圖)
從表中數據可以看出,一旦改變了轉速和泵出量,不同的驅動方式控制的蠕動泵會有不同結果。3種驅動方式中,RS-485通訊方式的控制精度最優,脈沖次之,模擬量的誤差最大。
RS-485通訊的優點
RS-485通訊方式除了賦予蠕動泵高控制精度外,還具備以下優點:
① 系統運行穩定——利用專用通信總線把集中器和主站安全、可靠地連接起來。除非設備接口硬件損壞,或者總線線路斷開,否則總線抄表系統會一直保持良好的通信效果和抄收成功率。
② 通信速率高——由于使用的是專用的有線通信線路連接,線路上除了通信信號外,再無其他信號。且外來的干擾信號耦合到線路后的衰減很大,所以集中器能以較高的速率與主站通信。
③ 抗干擾——RS-485總線信道是專用的通信信道,通過在通信線纜上添加的屏蔽,可以有效地保證通信效果,所以具有較強的抗空間干擾性能。
HOLVES的生物反應器在步進電機的驅動方式上已基本更新為RS-485通訊方式,有效地提高了發酵過程中蠕動泵的調控性能。
HOLVES一直在為全方位提高生物反應器的性能努力希望為生物實驗提供更為自動化和更為精密的設備。
注:本篇文章內容為霍爾斯HOLVES版權所有,未經授權禁止轉載及使用。
① 系統運行穩定——利用專用通信總線把集中器和主站安全、可靠地連接起來。除非設備接口硬件損壞,或者總線線路斷開,否則總線抄表系統會一直保持良好的通信效果和抄收成功率。
② 通信速率高——由于使用的是專用的有線通信線路連接,線路上除了通信信號外,再無其他信號。且外來的干擾信號耦合到線路后的衰減很大,所以集中器能以較高的速率與主站通信。
③ 抗干擾——RS-485總線信道是專用的通信信道,通過在通信線纜上添加的屏蔽,可以有效地保證通信效果,所以具有較強的抗空間干擾性能。
HOLVES的生物反應器在步進電機的驅動方式上已基本更新為RS-485通訊方式,有效地提高了發酵過程中蠕動泵的調控性能。
HOLVES一直在為全方位提高生物反應器的性能努力希望為生物實驗提供更為自動化和更為精密的設備。
注:本篇文章內容為霍爾斯HOLVES版權所有,未經授權禁止轉載及使用。



Copyright(C) 1998-2025 生物器材網 電話:021-64166852;13621656896 E-mail:info@bio-equip.com