
肌電信號的采集影響因素與肌電信息處理方法介紹
肌電信息的采集,包括肌電信息的檢出與引導、顯示與記錄以及特殊的采集術,如電的固定與定位術等。肌電信號通常受下述因素影響:
(1)肌肉的類型、能和狀況(包括疲勞);
(2)位于肌肉和電之間的組織、骨骼和皮膚的特性;
(3)電材料、表面結構、幾何形狀和間隔:
(4)電相對于皮膚的位置。
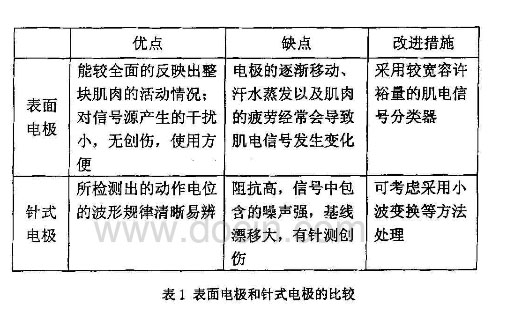
人體生物電的檢出,須依靠感受器一電的引導。由于人體生物電中,肌電微弱,因此引導肌電的電選擇關系甚大。常用的有表面電和針式電(見表1)。電的尺寸、形狀、材料、藝等,對檢出肌電的性能都有影響。電通常用銀片制成,也有使用金、鋁等材料。表面電形狀一般為圓形,直徑約在7~10咖,大的也有達15mm的。
不管采用何種電,檢測出來的信號都是許多運動單元發放的肌電位的向量和,須通過適當的分析方法對不同動作的肌電信號加以分離。這是肌電假肢的核心,直接影響到假肢控制的準確性和靈活性。
目前的肌電信息處理術主要有以下幾種:
(1)常規時域幅值肌電處理方法
這種方法是用肌電信號的時域峰峰值的均值,或用整組電采集肌肉信號的綜合特征,經控制電路識別后分別控制相應的假手動作。其特點是一對電或一個域值電壓只能控制一個自由度。目前大多數商業化假肢都采用這種控制策略。如果要控制多自由度,就須有幾對電來對信號進行采集,而要在截肢者身上找到幾對可以滿足多自由度控制要求的肌肉是很難的,而多電也會大大降低控制器的可靠性和穩定性。
(2)時間序列分析方法
這種方法將表面EMG信號的多通道看成一個向量值的自回歸過程,采用時間序列方法來提取肢函數分類所需的信息,獲得肢體運動的數值與方向的預測。肌電信號可以等價為零均值白噪聲過程激勵的一線性系統的輸出,一個典型的4~6階的AR模型,就可以準確地對上肢的肌電信號進行分類。近年來,對EMG的研究主要采用兩通道信號,利用Marpie算法建立AR模型,得到AR參數,然后用貝葉斯準則判別動作。還有人利用Hopfield網提取AR系數。
然而,由于EM6信號中的非靜態因素的存在,AR模型難以確地提取特征參數。同樣原因,非靜態處理模型如自適應模型也不是很好,主要在于產生的估計數差并存在參數震蕩。Kivyu等發現,當作用于肌肉上的為線性強制力時,AR參數具有時變特性,這導致了在寬帶噪聲和低幅度情況下,運動單元的動作電位變得不清晰,尤其在低水平的強制收縮中更為明顯。
(3)神經網絡處理方法:
神經網絡在處理復雜、模糊、有噪聲和非穩定信號時有明顯的持久性,并且對EMG信號的逐漸變化具有自適應能力。它還可以取代患者完成康復訓練中的大分作,有效地簡化了控制操作,提高了控制效率。因此神經網絡用于肌電信號分析十分合適。
近年來,采用神經網絡處理肌電信息的文獻數見不鮮。如在文獻o”中用作肌電信號頻譜的分類器,在文獻“”中則用來獲取肌電信息與假肢動作間的第一章緒論非線性映射關系。文獻“”構了一個將ANN多層視感器和采用新的不監控培養策略組成的ANN篩分器,以此獲得各個運動作用電位波形的形狀。文獻用多層感知器和隱式馬烏可模型相結合來對EMG信號進行分類,既可以解決識別效果差的缺陷,也考慮到了FAJG信號的動態性能。
此外,不少學者還提出了其它的肌電信息處理方法。如評估肌電信號的變化率,采用快速傅立葉分析,啟發式規則法,空間因子法,模糊分類方法,統計模式識別法,小波變換法,直方圖識別法等,都獲得了較好的效果。還有一種常見的方法是將神經網絡和AR模型結合對EMG進行處理。如用AR模型來檢測EMG的特征參,用神經網絡完成手臂特定運動或潛在運動的模式分類;文獻畸1則利用AR模型的四個參數以及肌電信號的率作為多層感知器網絡的輸入,可控制六個自由度。上述方法的成率都達到或超過了95%。
綜上所述,盡管肌電假肢存在著一定的缺陷,但其特有的優點仍然使其成為假肢研究中的熱點,其中商品化的假手中也只是單自由度假手成熟,如何提高其控制準確率是肌電控制假手中的重點。本文也將繼續對單自由度肌電假手作進一步地探索,本文完成的主要作如下:
1)肌電信號提取裝置的設計,即電的制作和提取電路的設計:
2)肌電信號分析程序編制;
3)假手控制電路的設計,即前置放大電路和驅動電路的設計。




Copyright(C) 1998-2025 生物器材網 電話:021-64166852;13621656896 E-mail:info@bio-equip.com